
با ترکیب یک فیلتر پایین گذر RC و یک تقویتکننده عملیاتی میتوانیم یک فیلتر پایینگذر اکتیو همراه با تقویتکنندگی بسازیم.
در مقالههای مربوط به فیلتر پسیو RC، دیدیم که مدارهای پایه فیلتر پایینگذر RC همچون فیلتر پایینگذر و فیلتر بالاگذر را میتوان با اتصال یک مقاومت به صورت سری با یک خازن بدون قطبش و یک منبع سیگنال سینوسی ورودی به صورت موازی با خازن ایجاد کرد.
همچنین یاد گرفتیم که اصلیترین عیب فیلترهای پسیو این است که دامنه سیگنال خروجی کمتر از دامنه سیگنال ورودی است یا به عبارت دیگر، گین هرگز بالاتر از یک نیست و امپدانس بار بر مشخصات فیلتر تاثیر دارد.
اگر مدارهای فیلتر پسیو چند طبقه داشته باشیم، این افت در دامنه سیگنال با نام «تضعیف» میتواند شدت بیشتری داشته باشد. یکی از راههای بازیابی یا کنترل این افت سیگنال، استفاده از تقویت از طریق استفاده از فیلترهای اکتیو است.
همانطور که از نام آنها پیداست، فیلترهای اکتیو حاوی اجزای اکتیو مانند تقویتکنندههای عملیاتی، ترانزیستورها یا FET در طراحی مدار خود هستند. آنها توان خود را از یک منبع تغذیه خارجی میگیرند و از آن برای تقویت سیگنال خروجی استفاده میکنند.
تقویت فیلتر همچنین میتواند برای شکل دادن یا تغییر پاسخ فرکانسی مدار فیلتر با تولید یک پاسخ خروجی انتخابیتر و ایجاد پهنای باند خروجی باریکتر یا حتی گستردهتر استفاده شود. پس تقویت، تفاوت اصلی بین «فیلتر پسیو» و «فیلتر اکتیو» است.
یک فیلتر اکتیو به طور کلی از یک تقویتکننده عملیاتی (آپ امپ) در طراحی خود استفاده میکند و در آموزش تقویتکننده عملیاتی دیدیم که یک آپ امپ دارای امپدانس ورودی بالا، امپدانس خروجی پایین و گین ولتاژ است که توسط شبکه مقاومت در داخل حلقه فیدبکش تعیین می شود.
بر خلاف فیلتر بالا گذر پسیو که به صورت تئوری پاسخ فرکانسی بی نهایت دارد، حداکثر پاسخ فرکانسی یک فیلتر اکتیو، به حاصلضرب گین در پهنای باند (یا گین حلقه باز) تقویت کننده عملیاتی مورد استفاده محدود میشود. با این حال، طراحی فیلترهای اکتیو به طور کلی بسیار آسانتر از فیلترهای پسیو است، آنها با طراحی مدار خوب، ویژگیهای عملکردی خوب، دقت بسیار خوب با شیب بین دو ناحیه تیز و نویز کم را هنگام استفاده فراهم میکنند.
فیلتر پایینگذر اکتیو
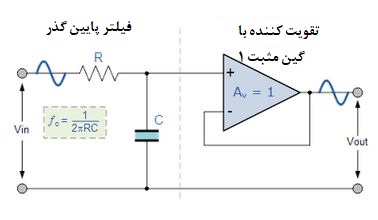
رایجترین و قابل فهمترین فیلتر اکتیو، فیلتر پایینگذر اکتیو است. اصل عملکرد و پاسخ فرکانسی آن دقیقا مشابه فیلتر پسیو قبلی است، تنها تفاوت این است که از یک آپ امپ برای تقویت و کنترل گین استفاده میکند. همانطور که نشان داده شده است، سادهترین شکل فیلتر پایینگذر اکتیو، اتصال تقویتکننده با گین مثبت یا منفی، همان مواردی که در آموزش آپ امپ مورد بحث قرار گرفت، به مدار اصلی فیلتر پایینگذر RC میباشد.
فیلتر پایین گذر درجه اول
 ۱. فیلتر پایینگذر درجه اول
۱. فیلتر پایینگذر درجه اول
این فیلتر اکتیو درجه اول، به سادگی از یک طبقه فیلتر پسیو RC تشکیل شدهاست که یک مسیر فرکانس پایین را به ورودی یک تقویتکننده عملیاتی با گین مثبت ارائه میدهد. تقویتکننده بهعنوان یک پیرو ولتاژ (بافر) طراحی شدهاست که برخلاف فیلتر RC پسیو قبلی که دارای بهره DC کمتر از واحد است، به آن یک گین DC، Av = +1 یا گین واحد میدهد.
مزیت این طراحی این است که امپدانس ورودی بالای آپ امپ از بارگذاری بیش از حد بر روی خروجی فیلترها جلوگیری میکند در حالی که امپدانس خروجی پایین آن، مانع از تحت تاثیر قرار گرفتن نقطه فرکانس قطع فیلترها توسط تغییرات امپدانس بار می شود.
با وجود اینکه این طراحی پایداری خوبی برای فیلتر فراهم میکند، نقطه ضعف اصلی آن این است که گین ولتاژی بالاتر از یک ندارد. با این حال، اگرچه گین ولتاژی واحد است، گین توان بسیار زیاد است زیرا امپدانس خروجی آن بسیار کمتر از امپدانس ورودی آن است. اگر گین ولتاژی بیشتر از یک مورد نیاز باشد، میتوانیم از مدار فیلتر زیر استفاده کنیم.
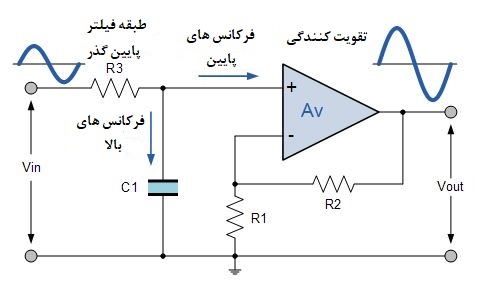
فیلتر پایینگذر فعال با تقویتکنندگی
 ۲. فیلتر پایینگذر درجه اول
۲. فیلتر پایینگذر درجه اول
پاسخ فرکانسی مدار مانند فیلتر RC پسیو خواهد بود، با این تفاوت که دامنه خروجی با گین باند عبور تقویتکننده (AF) افزایش مییابد. برای یک مدار تقویتکننده با گین مثبت، مقدار گین ولتاژ برای فیلتر به عنوان تابعی از مقاومت فیدبک (R۲) تقسیم بر مقدار مقاومت ورودی (R۱) داده میشود و به صورت زیر خواهد بود:
بنابراین، گین یک فیلتر پایینگذر اکتیو به عنوان تابعی از فرکانس به این صورت خواهد بود:
گین فیلتر پایینگذر درجه اول
جایی که
- AF گین باند عبور فیلتر و برابر با ( R2/R1+1 )
- F فرکانس سیگنال ورودی با واحد هرتز (Hz)
- FC فرکانس قطع با واحد هرتز (Hz)
بنابراین، عملکرد یک فیلتر پایینگذر اکتیو به دست آمده از معادله فرکانس – گین بالا به شرح زیر است:
۱. در فرکانسهای بسیار پایین :
![]()
۲. در فرکانس قطع :
۳. در فرکانسهای بسیار بالا :
![]()
پس فیلتر پایینگذر اکتیو از صفر هرتز تا حوالی نقطه فرکانس قطع بالا، گین ثابت AF دارد. در نقطه فرکانس قطع fC، گین برابر با 0.707AF است و بعد از این نقطه و با افزایش فرکانس، گین با شیب ثابتی کاهش مییابد؛ زمانی که فرکانس ۱۰ برابر (یک دهه) بیشتر میشود، گین ولتاژی تقسیم بر ۱۰ میشود.
به عبارت دیگر، هر زمان که فرکانس 10 برابر میشود، گین 20 دسیبل (20log(10)) کاهش مییابد. زمانی که با مدارهای فیلتر سر و کار داریم، مقدار گین باند عبور مدار معمولا با واحد دسیبل (dB) بیان شده و به این صورت تعریف میشود:
دامنه گین ولتاژی در واحد دسیبل (dB)
مثال ۱- فیلتر پایینگذر اکتیو
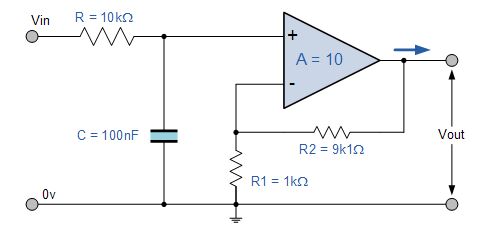
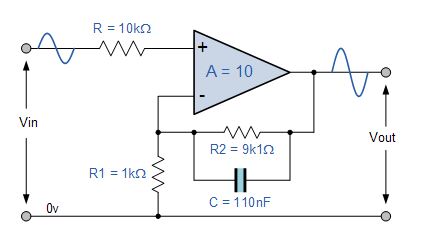
یک فیلتر پایینگذر اکتیو با گین مثبت که دارای گین ۱۰ در فرکانسهای پایین، نقطه فرکانس قطع یا فرکانس گوشه ۱۵۹ هرتز و امپدانس ورودی ۱۰ کیلواهم است طراحی کنید.
گین ولتاژی یک تقویتکننده عملیاتی با گین مثبت به صورت زیر به دست میآید:
اگر فرض کنیم که مقاومت R۱ برابر با یک کیلواهم است، با توجه به فرمول بالا مقدار R۲ به دست میآید:
![]()
پس برای داشتن گین ولتاژی 10، R۱ و R۲ به ترتیب برابر با 1 کیلواهم و 9 کیلواهم باید باشند. اما، یک مقاومت 9کیلواهم وجود ندارد، پس نزدیکترین مقدار مقاومت یعنی 9k1Ω (مقاومت 9 کیلواهم با تلرانس 1 درصد) استفاده میشود. تبدیل این گین ولتاژی به معادل دسیبل به این صورت خواهد بود:
![]()
فرکانس گوشه یا فرکانس قطع برابر با ۱۵۹ هرتز داده شده و امپدانس ورودی برابر با ۱۰ کیلواهم میباشد. فرمول فرکانس قطع به این صورت است:
که ƒc = 159Hz و R = 10kΩ
با جایگذاری مقادیر داده شده میتوان مقدار خازن را به دست آورد:

پس مدار فیلتر پایینگذر اکتیو نهایی با پاسخ فرکانسیاش به صورت زیر خواهد بود:
مدار فیلتر پایینگذر
 ۳. مدار فیلتر پایینگذر
۳. مدار فیلتر پایینگذر
منحنی پاسخ فرکانسی
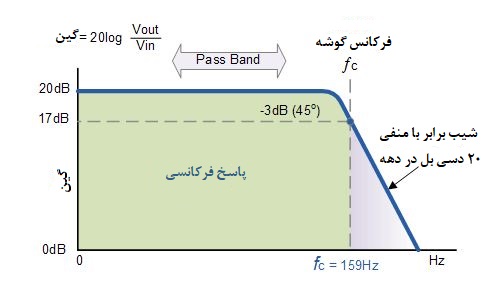 ۴. منحنی پاسخ فرکانسی
۴. منحنی پاسخ فرکانسی
اگر امپدانس خارجی متصل به ورودی مدار فیلتر تغییر کند، این تغییر امپدانس بر فرکانس گوشه فیلتر (قطعات متصل به یکدیگر به صورت سری یا موازی) نیز تاثیر میگذارد. یکی از راههای جلوگیری از هرگونه تاثیر خارجی، قرار دادن خازن به موازات مقاومت فیدبک R۲ است که به طور موثر آن را از ورودی حذف میکند اما همچنان ویژگیهای فیلترها را حفظ میکند.
با این حال، مقدار خازن از 100 نانوفاراد به 110 نانوفاراد کمی تغییر خواهد کرد زیرا به جای مقاومت 9 کیلو اهم از مقاومت 9k1Ω استفاده کردهایم، اما فرمول مورد استفاده برای محاسبه فرکانس گوشه یا قطع همان است که برای فیلتر پایین گذر پسیو RC استفاده میشود.
مثالهایی از ساختارهای متنوع مدار فیلتر پایینگذر اکتیو به صورت زیر خواهد بود:
مدار سادهشده فیلتر با تقویت کننده گین منفی
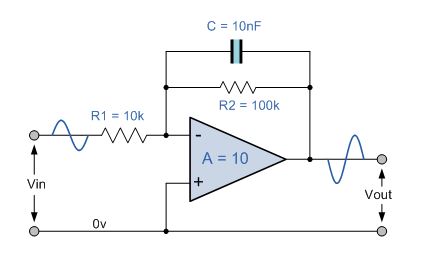 ۵. مدار سادهشده فیلتر با تقویت کننده گین منفی
۵. مدار سادهشده فیلتر با تقویت کننده گین منفی
در اینجا خازن از ورودی آپ امپ به مدار فیدبک خود منتقل شده و با R۲ موازی شده است. این ترکیب موازی C و R۲ نقطه منفی ۳ دسیبل را مانند قبل تنظیم میکند، اما گین تقویتکننده فراتر از فرکانس گوشه، مقدار مشخصی نخواهد داشت.
در فرکانسهای پایین، راکتانس خازن بسیار بیشتر از R۲ است، بنابراین گین dc با فرمول معکوس استاندارد ، برای این مثال، تنظیم می شود. با افزایش فرکانس، راکتانس خازن کاهش مییابد و امپدانس ترکیب موازی کاهش مییابد، تا اینکه در نهایت در فرکانس کافی بالا، XCبه صفر میرسد.
مزیت در اینجا این است که امپدانس ورودی مدار اکنون فقط R۱ است و سیگنال خروجی معکوس شده است. با توجه به تعیین فرکانس گوشه با اجزای تعیینکننده در مدار فیدبک، نقطه تنظیم RC تحت تاثیر تغییرات امپدانس منبع قرار نمیگیرد و گین dc را میتوان مستقل از فرکانس گوشه تنظیم کرد.
مدار فیلتر با تقویتکننده گین مثبت با گین واحد
 ۶. مدار فیلتر با تقویتکننده گین مثبت با گین واحد
۶. مدار فیلتر با تقویتکننده گین مثبت با گین واحد
در اینجا به دلیل موازی شدن خازن با مقاومت فیدبک R۲، فرکانس گوشه پایینگذر مانند قبل تنظیم میشود، اما در فرکانسهای بالا، راکتانس خازن، R۲ را اتصال کوتاه کرده و گین تقویتکننده را کاهش میدهد. در یک فرکانس به اندازه کافی بالا، بهره تا مقدار واحد (0dB) پایین میآید و تقویتکننده عملا یک پیرو ولتاژ میشود، به عبارت دیگر معادله گین میشود که برابر با 1 میشود.
کاربرد فیلترهای پایینگذر اکتیو در تقویتکنندههای صوتی، اکولایزرها یا اسپیکرها برای هدایت سیگنالهای باس فرکانس پایینتر به بلندگوهای باس بزرگتر یا کاهش هرگونه نویز فرکانس بالا یا اعوجاج نوع «هیس» است. هنگامی که فیلترهای پایینگذر اکتیو به این صورت در کاربردهای صوتی استفاده میشود، Bass boost نامیده میشوند.
فیلتر پایینگذر اکتیو درجه دوم
همانند فیلتر پسیو، یک فیلتر پایینگذر اکتیو درجه اول را میتوان به سادگی با استفاده از یک شبکه RC اضافی در مسیر ورودی به فیلتر پایینگذر درجه دوم تبدیل کرد. پاسخ فرکانسی فیلتر پایینگذر درجه دوم مشابه نوع درجه اول است با این تفاوت که شیب کاهش گین در باند توقف، دو برابر فیلترهای مرتبه اول یعنی 40 دسیبل در دهه (12 دسیبل در اکتاو) خواهد بود. بنابراین مراحل طراحی مورد نیاز فیلتر پایینگذر اکتیو درجه دوم یکسان است.
مدار فیلتر پایینگذر اکتیو درجه دوم
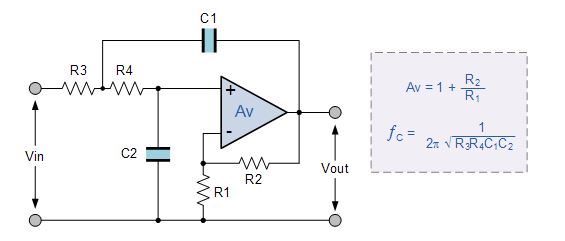 ۷. مدار فیلتر پایینگذر اکتیو درجه دوم
۷. مدار فیلتر پایینگذر اکتیو درجه دوم
هنگامی که مدارهای فیلتر را به صورت کسکود پشت هم قرار میدهیم تا فیلترهای درجه بالاتر را تشکیل دهند، گین کلی فیلتر برابر است با حاصلضرب گینهای هر طبقه؛ به عنوان مثال، ممکن است گین یک طبقه ۱۰ و گین طبقه دوم ۳۲ و گین طبقه سوم ۱۰۰ باشد. پس همانطور که در زیر نشان داده شدهاست، گین کلی برابر با ۳۲۱۰۱۰۰ یعنی ۳۲۰۰۰ خواهد بود.
کسکود کردن گین ولتاژی
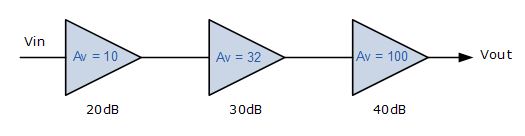 ۸. کسکود کردن گین ولتاژی
۸. کسکود کردن گین ولتاژی
فیلترهای اکتیو درجه دوم (دو قطبی) مهم هستند زیرا فیلترهای درجه بالاتر را میتوان با استفاده از آنها طراحی کرد. با کسکود کردن فیلترهای درجه اول و دوم، فیلترهایی سفارشی با درجه فرد یا زوج تا هر مقداری را میتوان ساخت. در مقاله بعدی در مورد فیلترها، خواهیم دید که فیلترهای بالاگذر اکتیو را میتوان با جابجایی موقعیت مقاومت و خازن در مدار ساخت.
دیدگاه خود را بنویسید